
- 论文链接:https://arxiv.org/pdf/2403.11695.pdf
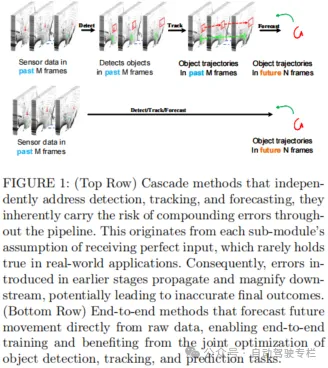
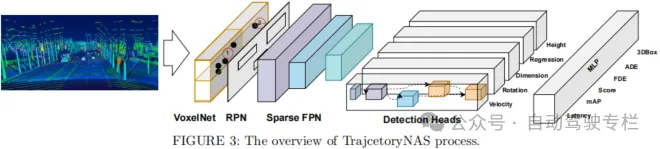
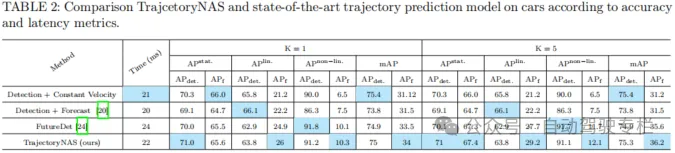
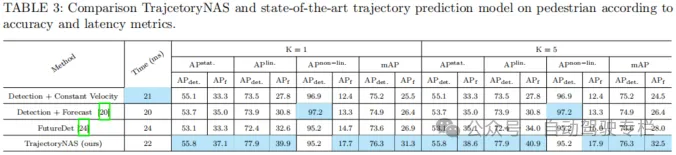
本文介绍了TrajectoryNAS:一种用于轨迹预测的神经结构搜索。自动驾驶系统是一项快速发展的技术,其可以实现无人驾驶汽车的量产。轨迹预测是自动驾驶系统的一个关键组成部分,其使汽车能够预测周围目标的运动,从而实现安全导航。由于使用激光雷达点云数据的轨迹预测提供了3D信息,因此其比使用2D图像的轨迹预测表现更好。然而,处理点云数据比2D图像更复杂、更耗时。因此,使用点云数据的最先进的3D轨迹预测存在速度慢和错误预测等问题。本文引入了TrajectoryNAS,这是一种着重于利用点云数据进行轨迹预测的开创性方法。通过利用神经结构搜索(NAS),TrajectoryNAS自动化轨迹预测模型的设计,以凝聚的方式包含目标检测、跟踪和预测。这种方法不仅解决了这些任务之间复杂的相互依赖关系,还强调了轨迹建模中准确性和效率的重要性。通过实证研究,TrajectoryNAS展现了其在提高自动驾驶系统性能方面的有效性,标志着该领域取得了重大进展。实验结果表明,与其它轨迹预测方法相比,TrajectoryNAS在nuScenes数据集上的准确性至少提高了4.8%,延迟至少降低了1.1倍。
主要贡献
本文的贡献总结如下:
本文介绍了TrajectoryNAS,它在自动驾驶轨迹预测领域具有开创性意义。与先前研究不同,本文方法首次以端到端的方式实现了神经架构搜索(NAS),涵盖了目标检测、跟踪和预测。这种综合性方法解决了子任务之间相互依赖性带来的复杂挑战,如点云处理、检测和跟踪。
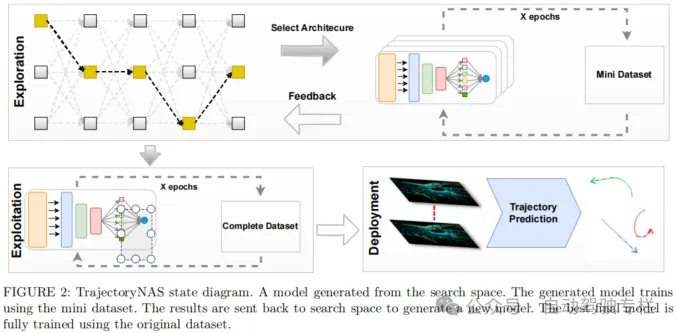
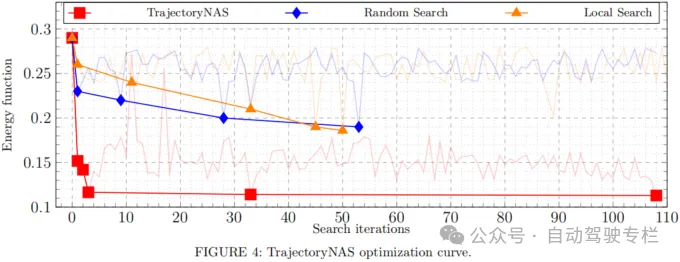
文章利用了高效的小型数据集,并引入了高效的两步过程以满足与神经结构搜索相关的计算需求。首先,采用小型数据集加速最优结构的识别,然后将识别的结构应用于完整数据集,确保可扩展性和准确性。这种简化方法在处理大量数据集时尤为重要。
在这项工作中,作者提出了一种创新的多目标能量函数,这是本研究的重要亮点。该能量函数综合考虑了目标检测、跟踪、预测和时间约束等因素。通过将这些不同要素融合到一个统一的框架中,该方法超越了现有方法中常被忽视的目标之间复杂关系。新的能量函数的引入增强了TrajectoryNAS的预测能力,提高了其在实际场景中的性能表现。
论文图片和表格
总结
本文提出了TrajectoryNAS,这是一种自动模型设计方法,其显著增强了自动驾驶的3D轨迹预测。通过在考虑关键性能指标的同时对速度和准确性进行优化,TrajectoryNAS在nuScenes数据集上的准确性至少提高了4.8%,延迟至少降低了1.1倍,其优于现有方法。



